
YTM32B1XXX系列MotorDemo使用相关
-
1 简介
1.1 此demo适配于YTM32B1LE05H0MLHT, YTM32B1MC03H0MLHT, YTM32B1MD14G0MLHT, YTM32B1ME05G0MLHT这四款封装为LQFP64的通用MCU,代码中引脚配置pintopin兼容;
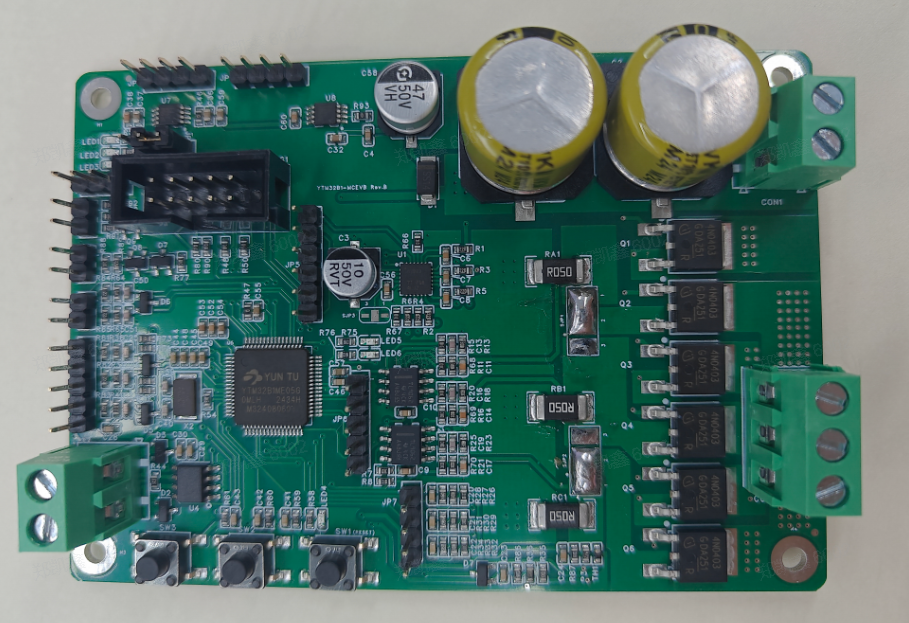
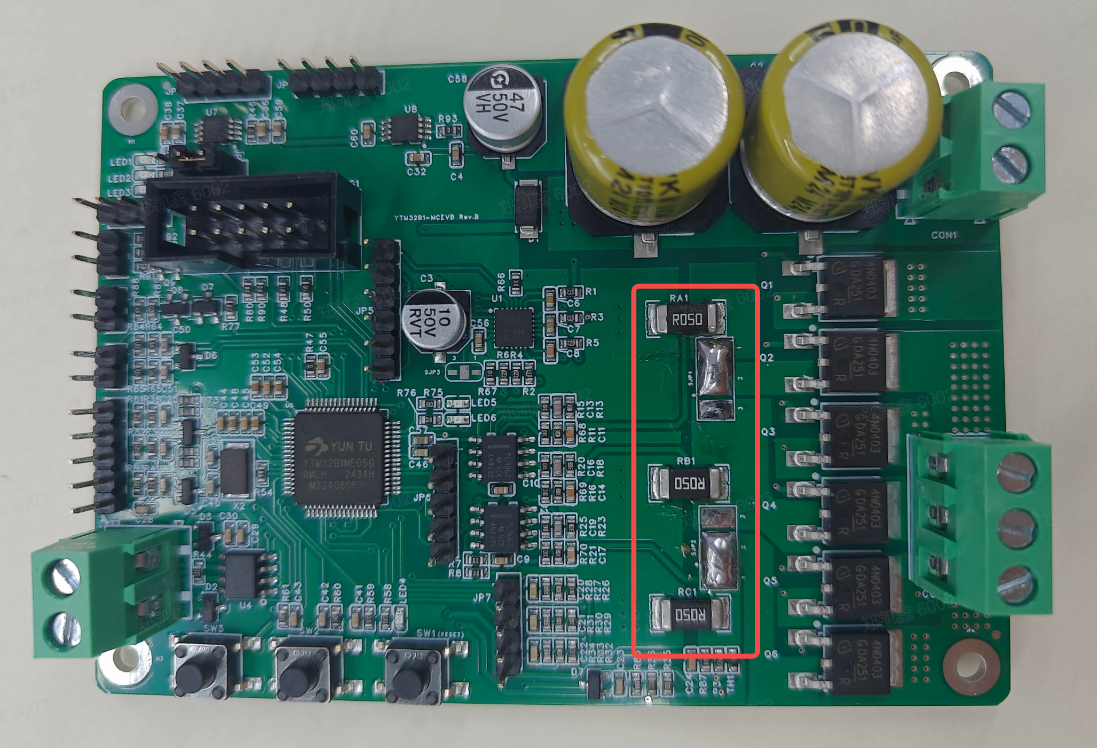
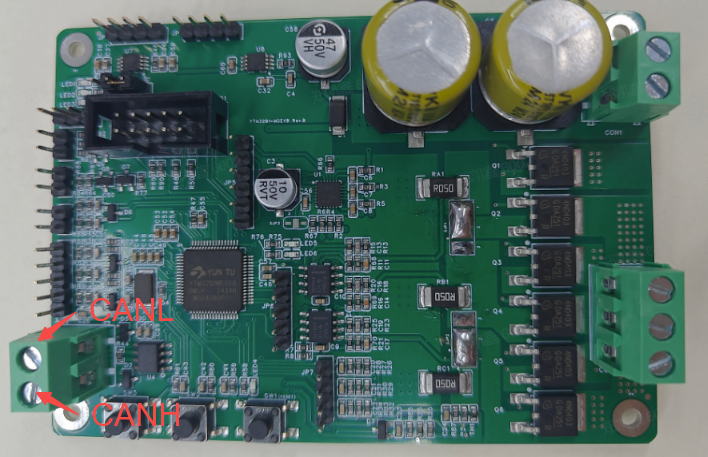
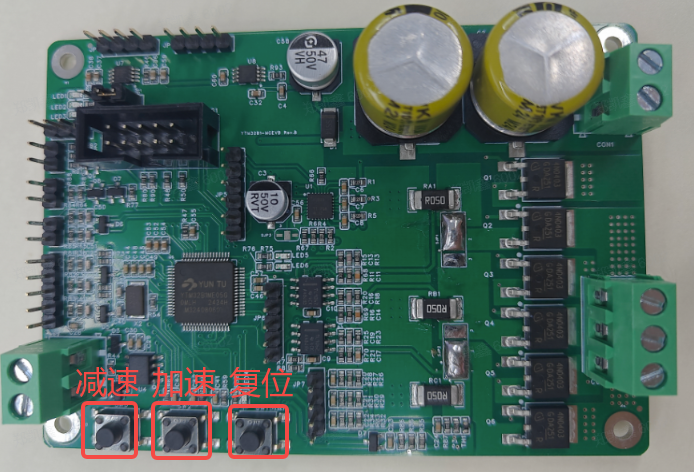
1.2 Demo实物图
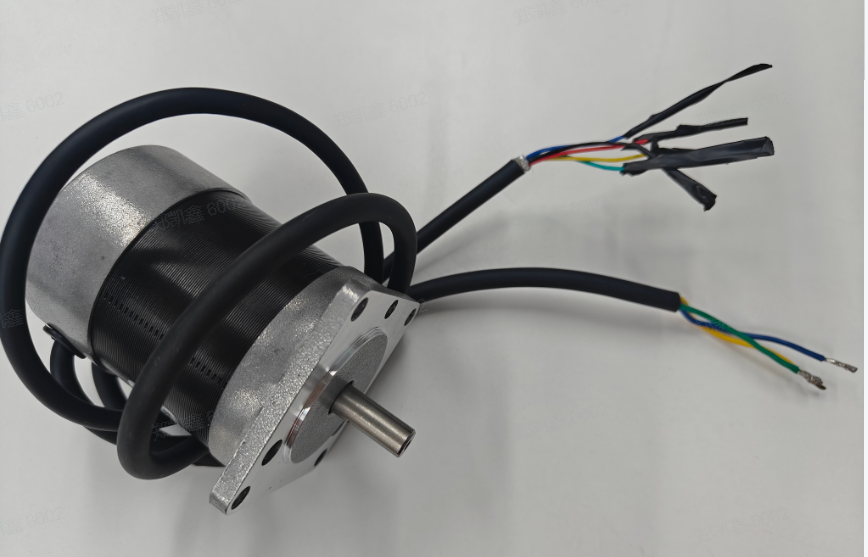
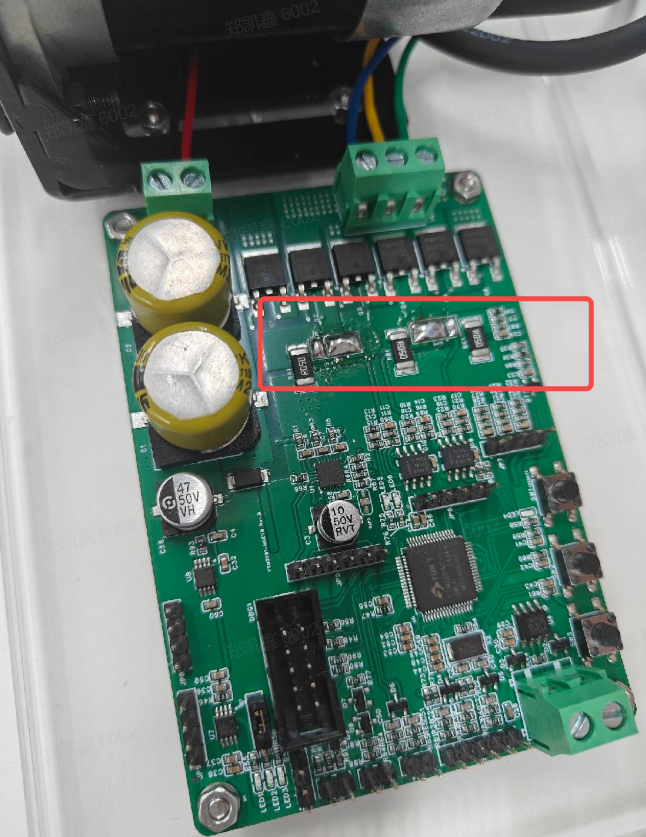
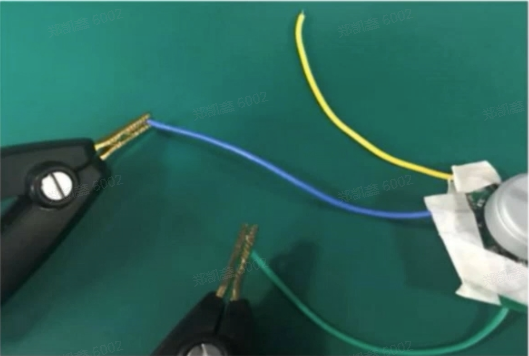
1.3 电机实物图
三线为电机的三项,五线为传感器端,不使用建议用绝缘胶带包裹;
1.4 此demo采样方式为三电阻相电流采样方案与单电阻母线电流采样方式;
2 demo配置步骤
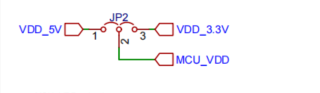
2.1 MCU供电选择
MCU通过跳帽可选5V或3.3V电源域;
原理图
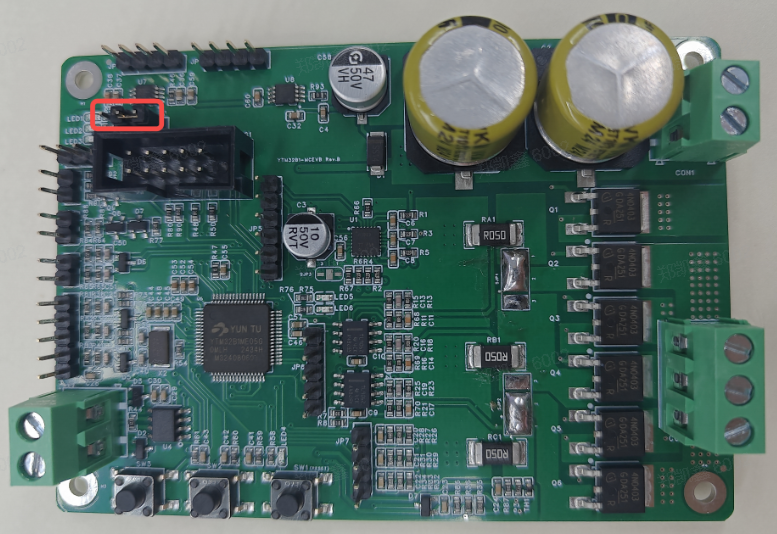
实物图,此时为5V供电;
2.2 采样电阻配置
原理图
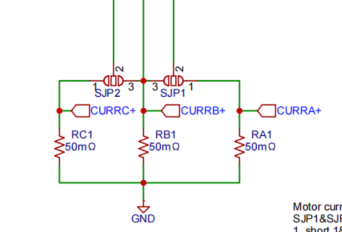
2.2.1 将SJP1-1与SJP1-2用锡短接,将SJP2-1与SJP2-2用锡短接,配置为三项电阻采样;
实物图
2.2.2 将SJP1-1与SJP1-2用锡短接,将SJP2-1与SJP2-2用锡短接,配置为单电阻母线电流采样;
实物图
2.3 电机与demo连接
接线端口
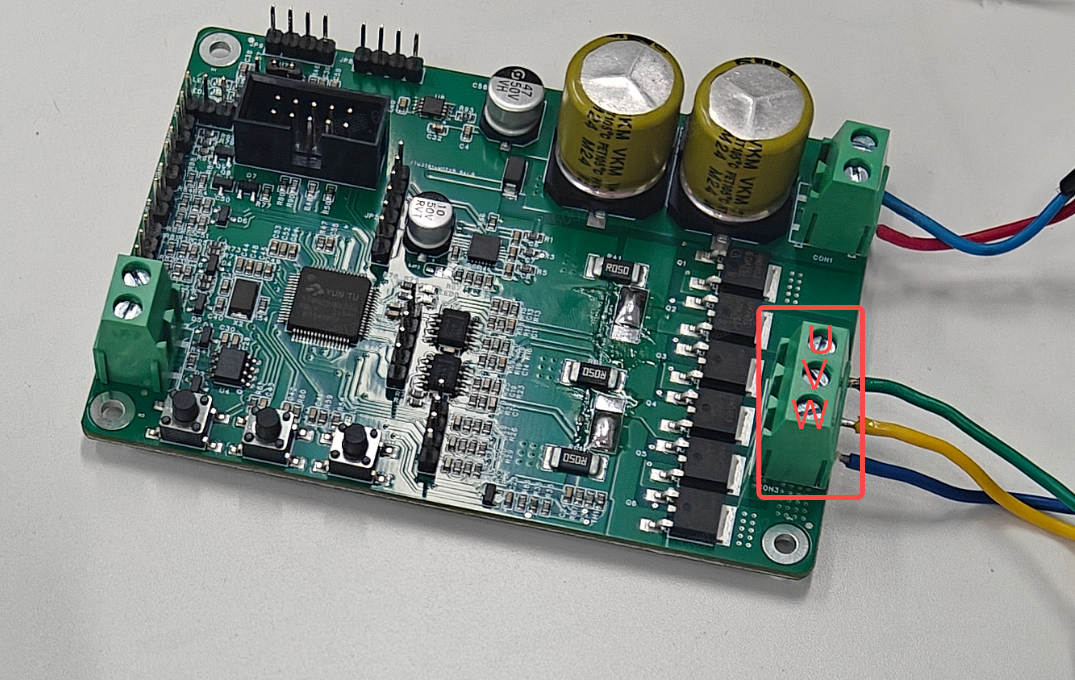
注:接线不同导致转向不同;2.4 Debug调试口连接
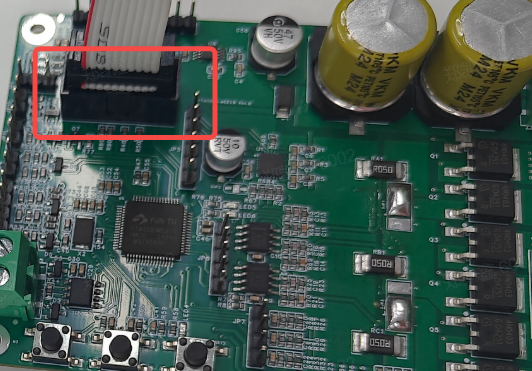
debug为SWD协议,板上端口为10pin SWD标准防呆端口;
2.5 电源连接
此demo为12V系统,直流源供电
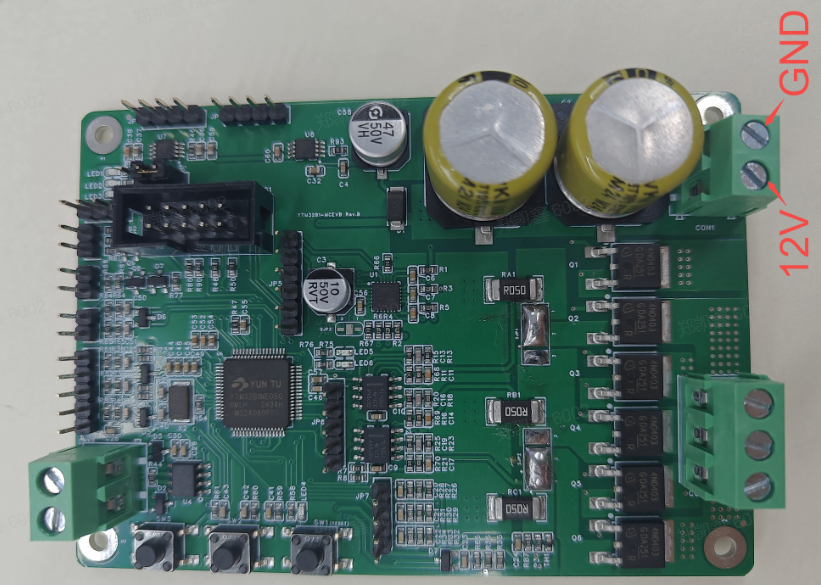
注:使用直流源供电时,推荐限流5A防止系统因直流源限流不工作;经过以上步骤后,即可上电调试了;
3 调试
3.1 电机参数测量
3.1.1 电阻与电感
测试仪器:LCR
选用LS-RS档,电平选择1V,测电阻时频率选择100Hz,测量电感时选择1KHz,测试之前最好进行开路和短路清零。接线方式为表笔与电机任意两相连接,需测三组(例:黄蓝,黄绿,蓝绿三组);
测得结果为线电阻与线电感,进行计算得到相电阻与相电感:
phase resistance = ((R1 + R2 + R3) / 3 ) / 2;
phase inductance = ((L1 + L2 + L3) / 3 ) / 2;
注:此电机为表贴式电机,Lq=Ld;3.1.2 磁链常数测量
测试仪器:示波器
用示波器一个探头的地与信号分别连接电机任意两相,用绳子或其它工具缠绕电机转子,拉动使其旋转,示波器捕捉反向电动势,选取较为均匀的反向电动势波形;
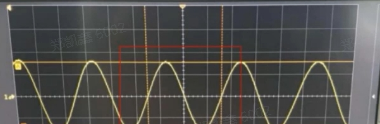
得到峰峰值Vpp和频率F,计算得到磁链常数:
KFI = Vpp / (4 * π * F * sqrt(3));3.1.3 极对数测量
有多种方式,这里介绍较为常用的一种方式,将电机任意两相连接直流源的正负,通电,电压自定义(不能过大,通常为1V),电流500mA,然后用手转动转子,可以感觉出来有停顿,几次停顿即为几对极,若停顿感觉不明显可每次500mA递增电流后重复动作;3.2 PEAK_VOLATGE
BUS电压采样分压电路
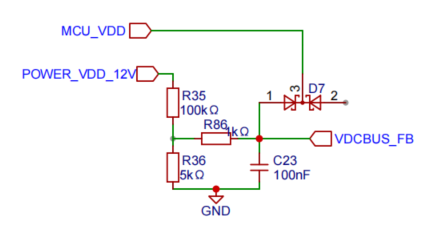
根据原理图可得知可测量最大母线电压为 Vbusmax = VDDmcu * 105 / 5;3.3 PEAK_CURRENT
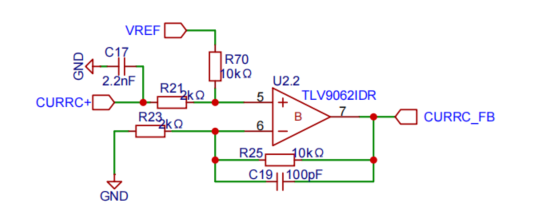
3.3.1 电流采样运放电路
3.3.2 shunt电路
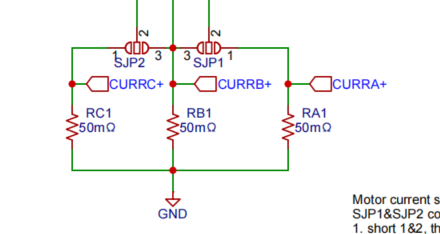
根据原理图可得知电流增益G = 10KΩ/2KΩ = 5, 采样电阻R = 0.05Ω,计算公式为:
Peak current = (0.5 * Vref / G) / R;至此需测量参数测量结束,将测得参数填入代码;
4 YTM32B1XXX系列MotorDemo原理图
SCH_motor_driver_2025-04-22.pdf
5 MotorDemoFOC算法电流环时间对比

6 YTM32B1XXX系列MotorDemo代码
7 YTM32B1XXX系列MotorDemo调速
demo可调速范围为300rpm/min - 1500rpm/min
7.1 CAN总线调速
CAN总线接线口实物图:
通过CAN总线可控制电机转速,停止,复位,观察电机速度
DBC文件为:
MotorCtrl.zip
控制电机demo报文ID为0x201
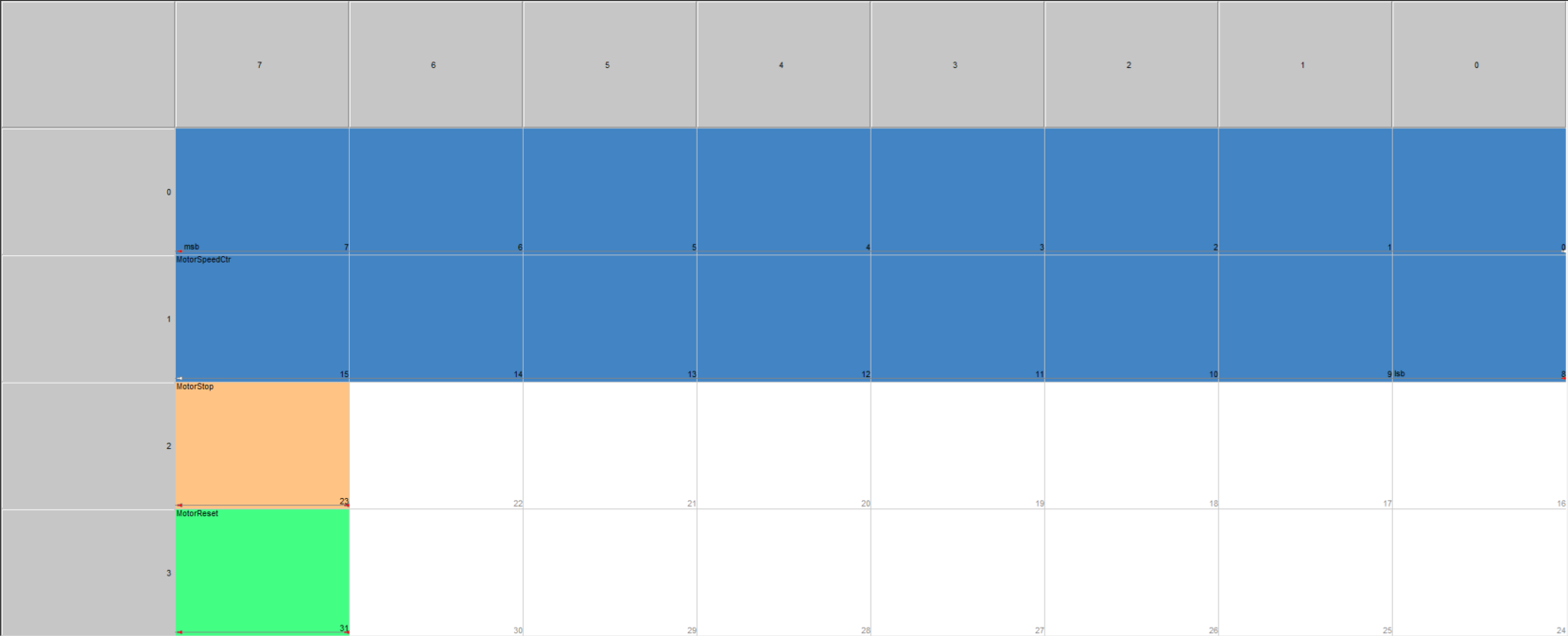
电机demo发送报文ID为0x200
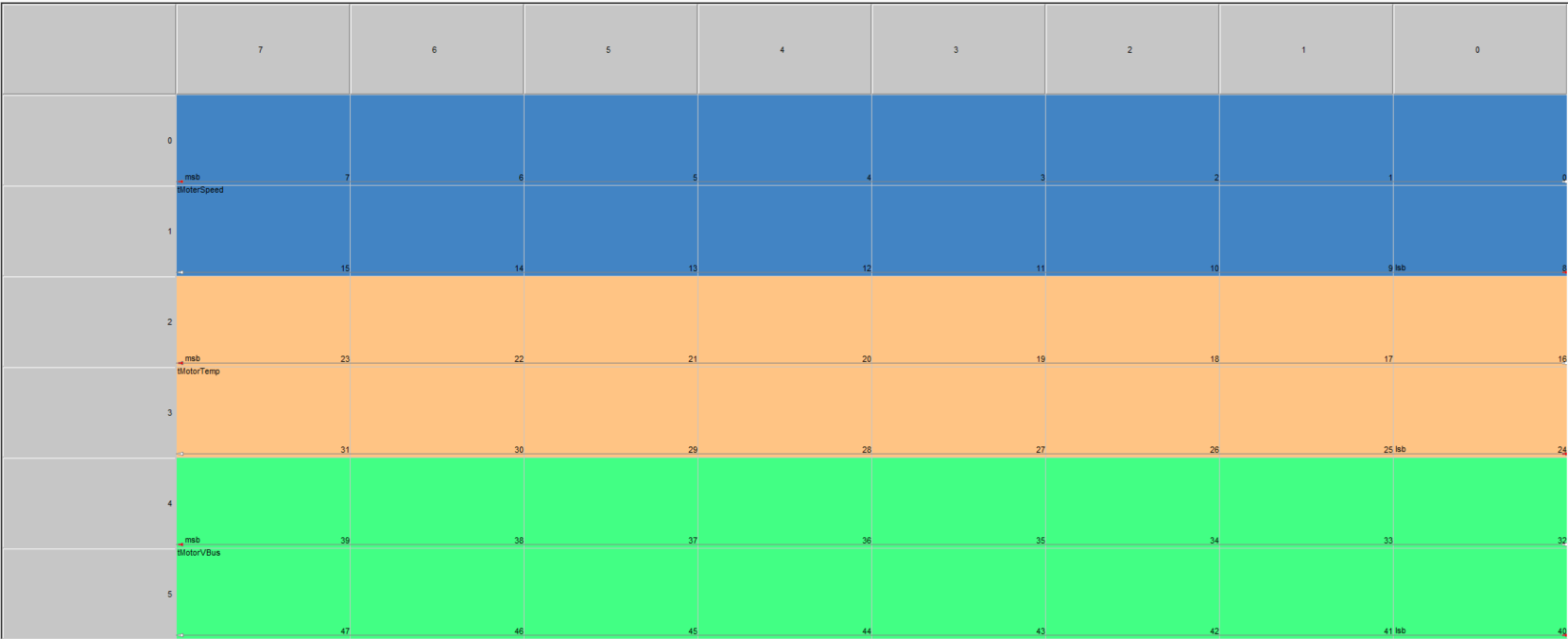
注:电机温度与Bus总线电压报文待改板后更新7.2 按键调速
每次按键调速为100rpm/min
-
嗨,有2个问题请教一下:
1.你们的Demo中使用的,是哪种观测器?
2.FOC算法是否支持低温启动?对电机参数有没有要求,比如:极对数、电机品牌什么的? -
JurgenFeng 在 YTM32B1XXX系列MotorDemo使用相关 中说:
嗨,有2个问题请教一下:
1.你们的Demo中使用的,是哪种观测器?
2.FOC算法是否支持低温启动?对电机参数有没有要求,比如:极对数、电机品牌什么的?1.观测器是滑模观测器;
2.支持低温启动,包括根据不同的电机,软件需要具体适配。 -
 J JurgenFeng 在 中 引用了 这个主题
J JurgenFeng 在 中 引用了 这个主题
快速上手云途开发生态
发帖前请查看
帮助改进和优化YT CONFIG TOOL,有机会抽取YTM32B1ME0 EVB哦...