
[LE1系列]YT SDK LIN 自适应波特率 Demo问题反馈
-
修复Demo :Lin_AutoBaud_Interrupt_Demo
修复版本 :0.3 -> 0.4
问题标题 :误将ptmr捕获的0值当作sync捕获开始
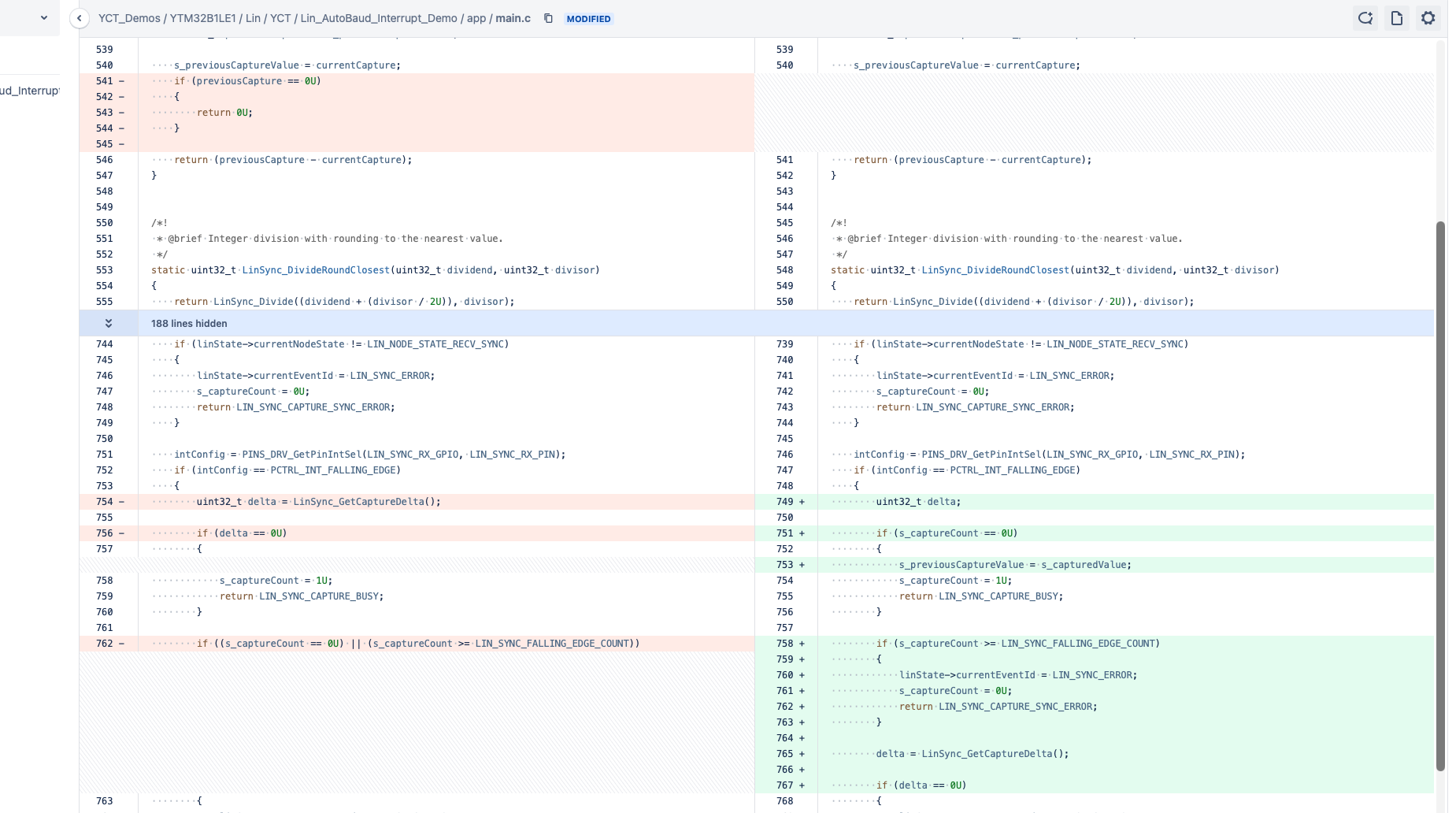
问题描述:中断版 LIN AutoBaud Demo 使用s_previousCaptureValue == 0U作为哨兵值来判断首个 Sync falling edge。
但 pTMR 是自由运行的递减计数器,TCV == 0是合法硬件计数值。
如果某次边沿捕获刚好读到 0,下一次 falling edge 会被误判为首个边沿,导致 Sync 采样错位,进而可能造成波特率识别失败或 Sync error。
修改策略:改用s_captureCount == 0U判断首个 falling edge,不再复用捕获时间戳本身作为状态标记。
LinSync_GetCaptureDelta()只负责计算两个有效捕获时间戳之间的 delta。 -
-
 S sunxuehu 在 中 引用了 这个主题
S sunxuehu 在 中 引用了 这个主题
快速上手云途开发生态
发帖前请查看
帮助改进和优化YT CONFIG TOOL,有机会抽取YTM32B1ME0 EVB哦...