Your browser does not seem to support JavaScript. As a result, your viewing experience will be diminished, and you have been placed in read-only mode.
Please download a browser that supports JavaScript, or enable it if it's disabled (i.e. NoScript).
jan 在 同一个物理引脚在不同时间段切换CAN和GPIO工作模式 中说:
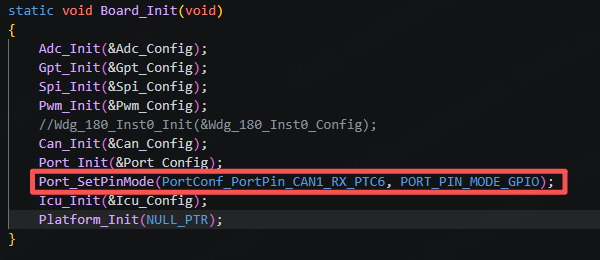
初始化Icu前已经把PTC6引脚切换成GPIO模式了吗
我试了一下,在ICU初始化前切换成GPIO模式,程序还是停在了ICU的初始化中的/Clear pin interrupt flag/ICU_GPIO_REG_ADDR32_INDEX_W1C_BIT(GPIO_PIFR_ADDR32(PortInstance), PortChannel);
如果关了的话是改不动的
向阳 在 同一个物理引脚在不同时间段切换CAN和GPIO工作模式 中说:
您好,没明白您的意思,是什么关闭无法修改,想实现CANRX引脚在不同时间段切换CAN和ICU监控是否可行?该如何配置,麻烦您可以指导一下不?
请问你用的MCAL哪个版本的代码。
请问您将 CAN_RX 在休眠前切换成 ICU 捕获的目的是不是想监测 CAN 总线上是否还有报文?您们的需求是否是必须检测 CAN 总线上没有报文后才允许执行休眠逻辑是吗
请问你用的MCAL哪个版本的代码。 用的2.3.0的,目前这个问题解决了,是CanEnableUserModeSupport勾选了,ICU的没勾
chenchao 你代码卡死有没有进MemManage_Handler
Kirk 在 同一个物理引脚在不同时间段切换CAN和GPIO工作模式 中说:
目的是在休眠前关闭CAN的一段时间监测 CAN 总线上是否还有报文,若这段时间检测到就触发中断重启CAN模块
您可以尝试用 ESR1[RX] 这个寄存器去判断 CAN 总线上是否有报文。休眠前 while 循环获取 ESR1[RX],如果出现 ESR1[RX] 为 1 情况就代表总线上有 CAN 报文,然后退出休眠逻辑,只有在一段时间内循环获取 ESR1[RX] 都为 0 的时候,表示 CAN 总线上无报文,可以执行休眠逻辑
快速上手云途开发生态
发帖前请查看
帮助改进和优化YT CONFIG TOOL,有机会抽取YTM32B1ME0 EVB哦...