
MC芯片使用MCAL发现CAN外设的Can_Lld_ReceiveOneFrame函数存在bug
已锁定
已解决
YT MCAL
-
一、背景
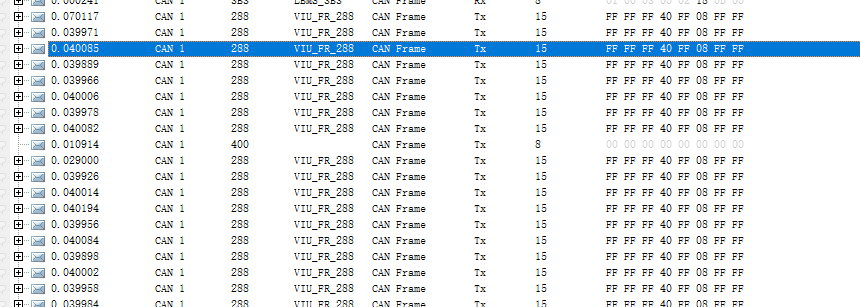
CAN FD,DTC=15,实际数据只有8字节,此时一发报文给MCU接收,MCU就会进hardfault,如下:
二、现状
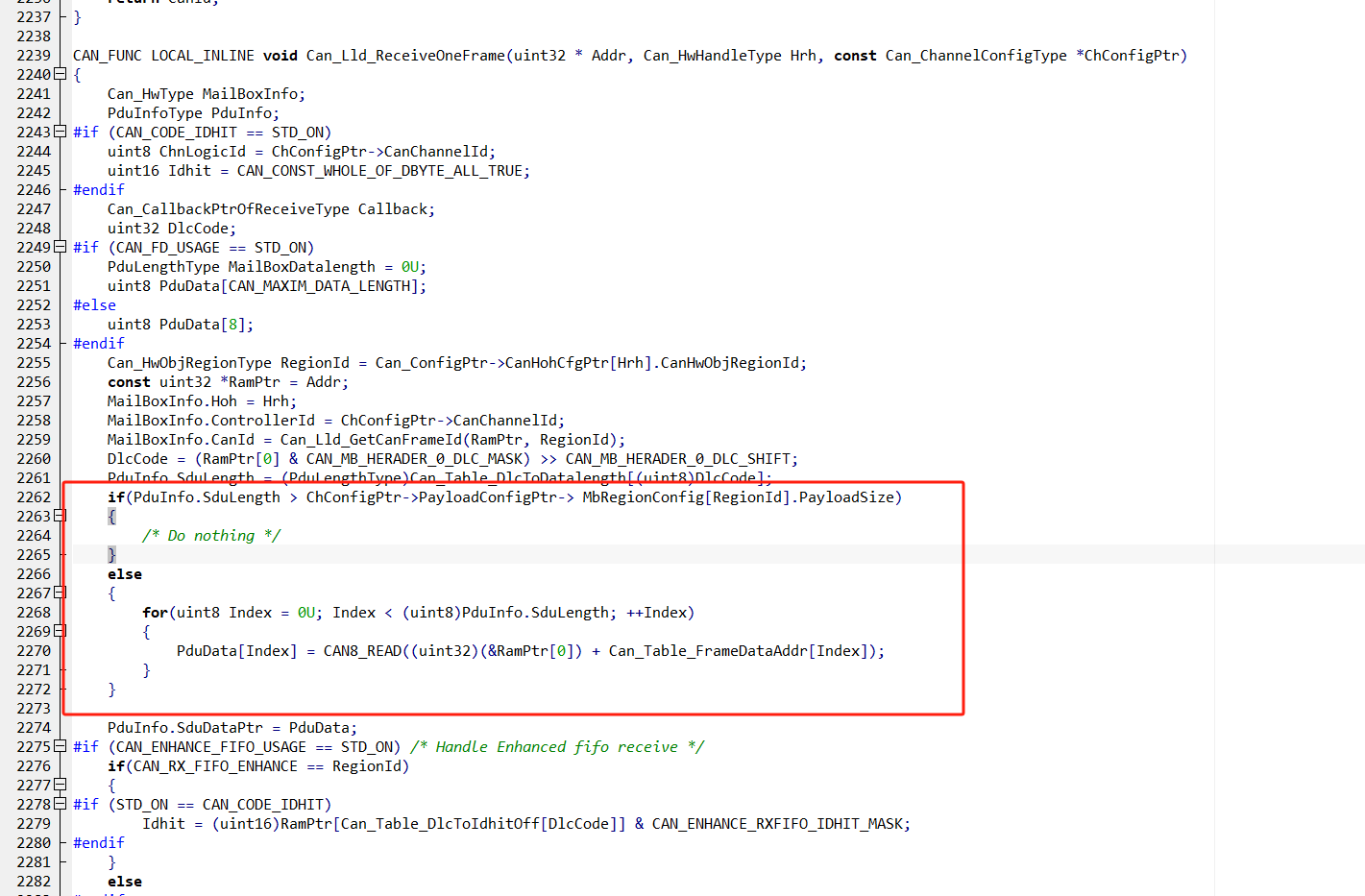
排查为Can_Lld_ReceiveOneFrame函数中未对Payload配置的大小进行检查就直接取数据(存在数组越界风险),原函数如下:CAN_FUNC LOCAL_INLINE void Can_Lld_ReceiveOneFrame(uint32 * Addr, Can_HwHandleType Hrh, const Can_ChannelConfigType *ChConfigPtr) { Can_HwType MailBoxInfo; PduInfoType PduInfo; #if (CAN_CODE_IDHIT == STD_ON) uint8 ChnLogicId = ChConfigPtr->CanChannelId; uint16 Idhit = CAN_CONST_WHOLE_OF_DBYTE_ALL_TRUE; #endif Can_CallbackPtrOfReceiveType Callback; uint32 DlcCode; #if (CAN_FD_USAGE == STD_ON) PduLengthType MailBoxDatalength = 0U; uint8 PduData[CAN_MAXIM_DATA_LENGTH]; #else uint8 PduData[8]; #endif Can_HwObjRegionType RegionId = Can_ConfigPtr->CanHohCfgPtr[Hrh].CanHwObjRegionId; const uint32 *RamPtr = Addr; MailBoxInfo.Hoh = Hrh; MailBoxInfo.ControllerId = ChConfigPtr->CanChannelId; MailBoxInfo.CanId = Can_Lld_GetCanFrameId(RamPtr, RegionId); DlcCode = (RamPtr[0] & CAN_MB_HERADER_0_DLC_MASK) >> CAN_MB_HERADER_0_DLC_SHIFT; PduInfo.SduLength = (PduLengthType)Can_Table_DlcToDatalength[(uint8)DlcCode]; for(uint8 Index = 0U; Index < (uint8)PduInfo.SduLength; ++Index) { PduData[Index] = CAN8_READ((uint32)(&RamPtr[0]) + Can_Table_FrameDataAddr[Index]); } PduInfo.SduDataPtr = PduData; #if (CAN_ENHANCE_FIFO_USAGE == STD_ON) /* Handle Enhanced fifo receive */ if(CAN_RX_FIFO_ENHANCE == RegionId) { #if (STD_ON == CAN_CODE_IDHIT) Idhit = (uint16)RamPtr[Can_Table_DlcToIdhitOff[DlcCode]] & CAN_ENHANCE_RXFIFO_IDHIT_MASK; #endif } else #endif #if (CAN_LEGACY_FIFO_USAGE == STD_ON) /* Handle legacy fifo receive */ if(CAN_RX_FIFO_LEGACY == RegionId) { #if (STD_ON == CAN_CODE_IDHIT) Idhit = (uint16)((RamPtr[0] & CAN_LEGACY_RXFIFO_IDHIT_MASK) >> CAN_LEGACY_RXFIFO_IDHIT_SHIFT); #endif } else #endif { if((uint32)CAN_CSCODE_RX_OVERRUN == ((RamPtr[0] & CAN_MB_HERADER_0_CODE_MASK) >> CAN_MB_HERADER_0_CODE_SHIFT)) { /* CAN_CSCODE_RX_OVERRUN */ /* Can module shall raise the runtime error CAN_E_DATALOST in case of "overwrite" or "overrun" event detection. Trace SWS_Can_00395 */ Can_Bak_CallDatalost(ChConfigPtr->CanChannelId); if(NULL_PTR != ChConfigPtr->CanCallbackPtr->OverrunCallback) { ChConfigPtr->CanCallbackPtr->OverrunCallback(Hrh); } } #if (CAN_FD_USAGE == STD_ON) if(TRUE == ChConfigPtr->FdUsage) { MailBoxDatalength = ChConfigPtr->PayloadConfigPtr-> \ MbRegionConfig[RegionId].PayloadSize; if (PduInfo.SduLength > MailBoxDatalength) { PduInfo.SduLength = MailBoxDatalength; } } #endif /* Read Timer register to unlock the MB */ CAN32_READ(((uint32)Addr & CAN_BASE_ADDR_MASK) + CAN_TIMER_OFFSET32); } #if (CAN_CODE_IDHIT == STD_ON) if(NULL_PTR != Can_LocFifoIdhitPtr[ChnLogicId]) { *Can_LocFifoIdhitPtr[ChnLogicId] = Idhit; } #endif Callback = Can_ConfigPtr->CanReceiveCallback; if(NULL_PTR == Callback) { CanIf_RxIndication(&MailBoxInfo, &PduInfo); } else { if(TRUE == Callback(MailBoxInfo.Hoh, MailBoxInfo.CanId, (uint8)(PduInfo.SduLength), PduInfo.SduDataPtr)) { CanIf_RxIndication(&MailBoxInfo, &PduInfo); } } #if (CAN_CODE_IDHIT == STD_ON) if(NULL_PTR != Can_LocFifoIdhitPtr[ChnLogicId]) { *Can_LocFifoIdhitPtr[ChnLogicId] = CAN_CONST_WHOLE_OF_DBYTE_ALL_TRUE; } #endif }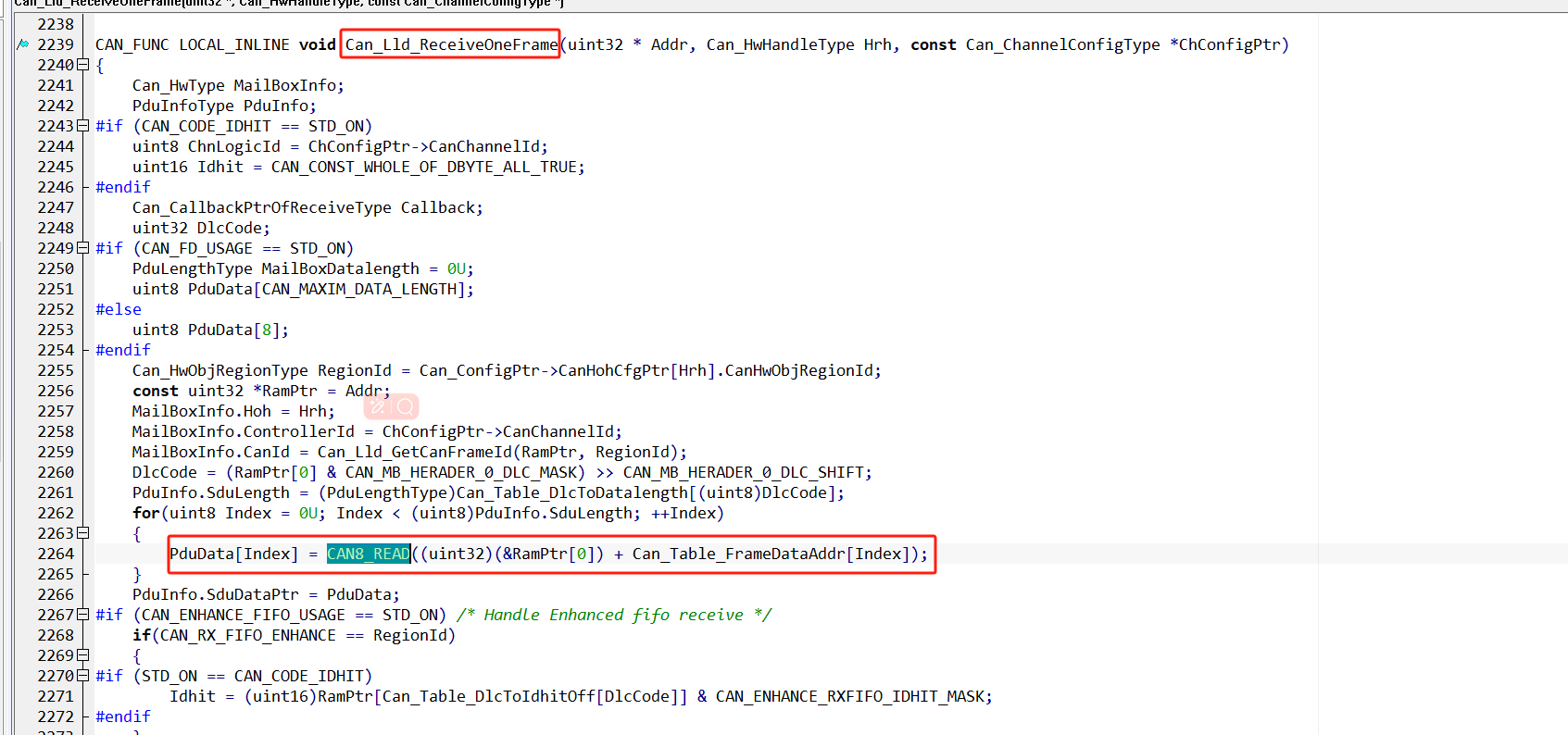
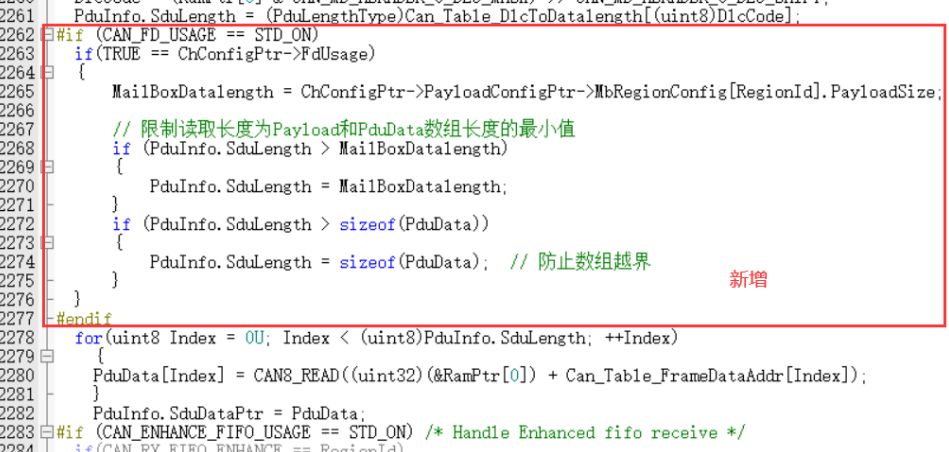
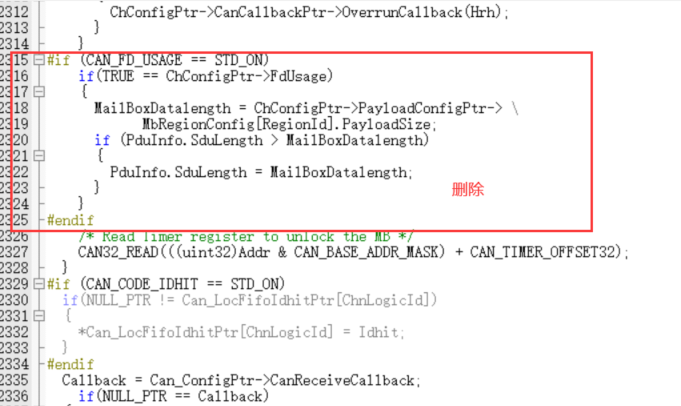
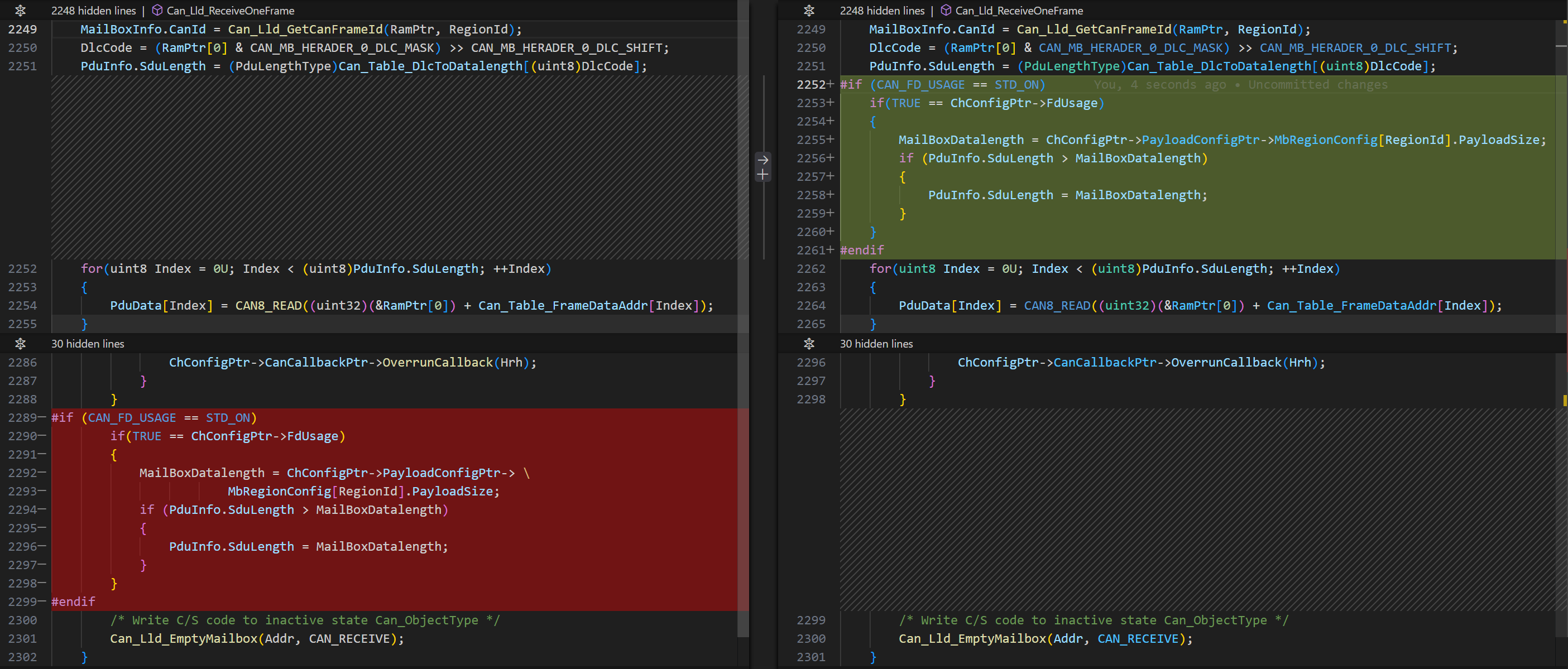
②现修改原函数如下:
AN_FUNC LOCAL_INLINE void Can_Lld_ReceiveOneFrame(uint32 * Addr, Can_HwHandleType Hrh, const Can_ChannelConfigType *ChConfigPtr) { Can_HwType MailBoxInfo; PduInfoType PduInfo; #if (CAN_CODE_IDHIT == STD_ON) uint8 ChnLogicId = ChConfigPtr->CanChannelId; uint16 Idhit = CAN_CONST_WHOLE_OF_DBYTE_ALL_TRUE; #endif Can_CallbackPtrOfReceiveType Callback; uint32 DlcCode; #if (CAN_FD_USAGE == STD_ON) PduLengthType MailBoxDatalength = 0U; uint8 PduData[CAN_MAXIM_DATA_LENGTH]; #else uint8 PduData[8]; #endif Can_HwObjRegionType RegionId = Can_ConfigPtr->CanHohCfgPtr[Hrh].CanHwObjRegionId; const uint32 *RamPtr = Addr; MailBoxInfo.Hoh = Hrh; MailBoxInfo.ControllerId = ChConfigPtr->CanChannelId; MailBoxInfo.CanId = Can_Lld_GetCanFrameId(RamPtr, RegionId); DlcCode = (RamPtr[0] & CAN_MB_HERADER_0_DLC_MASK) >> CAN_MB_HERADER_0_DLC_SHIFT; PduInfo.SduLength = (PduLengthType)Can_Table_DlcToDatalength[(uint8)DlcCode]; #if (CAN_FD_USAGE == STD_ON) if(TRUE == ChConfigPtr->FdUsage) { MailBoxDatalength = ChConfigPtr->PayloadConfigPtr->MbRegionConfig[RegionId].PayloadSize; // 限制读取长度为Payload和PduData数组长度的最小值 if (PduInfo.SduLength > MailBoxDatalength) { PduInfo.SduLength = MailBoxDatalength; } if (PduInfo.SduLength > sizeof(PduData)) { PduInfo.SduLength = sizeof(PduData); // 防止数组越界 } } #endif for(uint8 Index = 0U; Index < (uint8)PduInfo.SduLength; ++Index) { PduData[Index] = CAN8_READ((uint32)(&RamPtr[0]) + Can_Table_FrameDataAddr[Index]); } PduInfo.SduDataPtr = PduData; #if (CAN_ENHANCE_FIFO_USAGE == STD_ON) /* Handle Enhanced fifo receive */ if(CAN_RX_FIFO_ENHANCE == RegionId) { #if (STD_ON == CAN_CODE_IDHIT) Idhit = (uint16)RamPtr[Can_Table_DlcToIdhitOff[DlcCode]] & CAN_ENHANCE_RXFIFO_IDHIT_MASK; #endif } else #endif #if (CAN_LEGACY_FIFO_USAGE == STD_ON) /* Handle legacy fifo receive */ if(CAN_RX_FIFO_LEGACY == RegionId) { #if (STD_ON == CAN_CODE_IDHIT) Idhit = (uint16)((RamPtr[0] & CAN_LEGACY_RXFIFO_IDHIT_MASK) >> CAN_LEGACY_RXFIFO_IDHIT_SHIFT); #endif } else #endif { if((uint32)CAN_CSCODE_RX_OVERRUN == ((RamPtr[0] & CAN_MB_HERADER_0_CODE_MASK) >> CAN_MB_HERADER_0_CODE_SHIFT)) { /* CAN_CSCODE_RX_OVERRUN */ /* Can module shall raise the runtime error CAN_E_DATALOST in case of "overwrite" or "overrun" event detection. Trace SWS_Can_00395 */ Can_Bak_CallDatalost(ChConfigPtr->CanChannelId); if(NULL_PTR != ChConfigPtr->CanCallbackPtr->OverrunCallback) { ChConfigPtr->CanCallbackPtr->OverrunCallback(Hrh); } } /* Read Timer register to unlock the MB */ CAN32_READ(((uint32)Addr & CAN_BASE_ADDR_MASK) + CAN_TIMER_OFFSET32); } #if (CAN_CODE_IDHIT == STD_ON) if(NULL_PTR != Can_LocFifoIdhitPtr[ChnLogicId]) { *Can_LocFifoIdhitPtr[ChnLogicId] = Idhit; } #endif Callback = Can_ConfigPtr->CanReceiveCallback; if(NULL_PTR == Callback) { CanIf_RxIndication(&MailBoxInfo, &PduInfo); } else { if(TRUE == Callback(MailBoxInfo.Hoh, MailBoxInfo.CanId, (uint8)(PduInfo.SduLength), PduInfo.SduDataPtr)) { CanIf_RxIndication(&MailBoxInfo, &PduInfo); } } #if (CAN_CODE_IDHIT == STD_ON) if(NULL_PTR != Can_LocFifoIdhitPtr[ChnLogicId]) { *Can_LocFifoIdhitPtr[ChnLogicId] = CAN_CONST_WHOLE_OF_DBYTE_ALL_TRUE; } #endif }具体变更如下:
②或者直接这样修改:
三、述求
希望云途大佬能够帮忙评估一下这样修改有无其他影响?
这两种修改方式哪种会更好一些?是否均可?
谢谢支持 -
感谢您的反馈!
这个Bug在解决这个帖子的Issue时被修复掉了,但是最新的驱动还需要一点时间才能release,所以目前建议您修改如下:
这样的修改后将先判断数据的有效位数,然后再获取数据,这样就不存在数组越界风险了。
修改有无其他影响?
原本驱动也考虑到了数据截断的问题,但没有考虑到可能会存在越界到不可访问的区域。这样的修改于原代码相比较,只是调整了接收数据长度的判断位置,所以不会有其他的影响。
此外,原本的判断代码是包裹在一个
if~elseif~else代码块中,用于区分接收到的消息是Legacy FIFO, Enhanced FIFO, 以及 MB,包裹在这个代码块中,是为了避免接收FIFO消息时不必要的判断,所以可以直接将这部分代码一移出代码块。这两种修改方式哪种会更好一些?是否均可?
两种方式中,第一种好一点。因为这样只是发生了数据截断,而第二种方式中,会导致 callback 函数中的报文数据是随机的值,debug起来更难理解。
-
F Frankie 将这个主题转为问答主题,在
-
快速上手云途开发生态
发帖前请查看
帮助改进和优化YT CONFIG TOOL,有机会抽取YTM32B1ME0 EVB哦...