
有无任意开发板的Flexcan_Legacyfifo的FLEXCAN_RX_FIFO_ID_FORMAT_B模式和FLEXCAN_RX_FIFO_ID_FORMAT_C模式例程或代码片段
-
yt0069 感谢支持。以LE05开发板的Flexcan_Legacyfifo_Demo并使用标准帧为例。预期效果:标准帧ID低四位不进行匹配
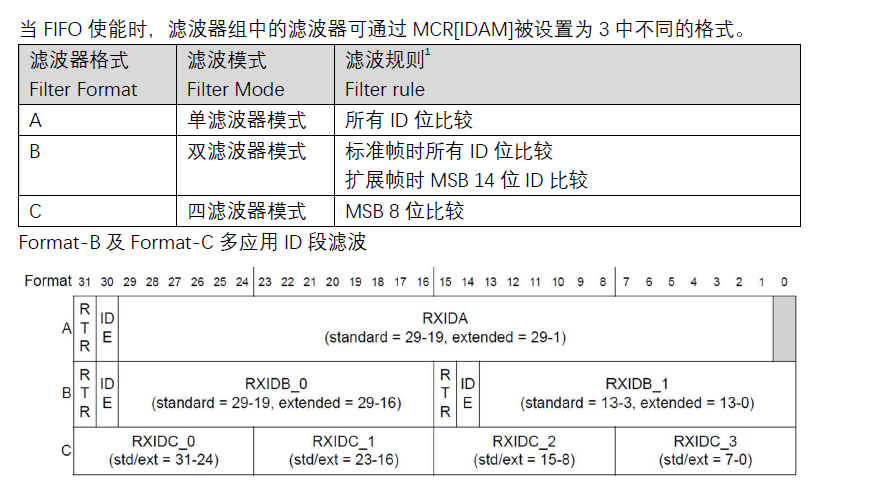
①.现象:使用模式A时,独立掩码设置为0x1FFFFFF0U时,标准帧ID低四位不进行匹配。即可接受ID范围为0x730~0x73F的标准帧。--问题:独立掩码不应该设置成0xFF87FFFEU才能实现标准帧ID低四位不进行匹配吗?( RXIDA(standard = 29-19,extended = 29-1))
②.由①实际现象可得,独立掩码设置为0x1FFFFFF0U时 (RXIDB_0(standard = 29-19,extended = 29-16)),模式B也应该可以接受ID范围为0x730~0x73F的标准帧,但是实际上我只能接受0x737这一个标准帧ID。且我尝试修改了独立掩码的其他位,没有找到规律
以下为我的main.c代码
/* USER CODE END Header */ #include "sdk_project_config.h" /* Includes ------------------------------------------------------------------*/ /* Private includes ----------------------------------------------------------*/ /* USER CODE BEGIN Includes */ /* USER CODE END Includes */ /* Private typedef -----------------------------------------------------------*/ /* USER CODE BEGIN PTD */ /* USER CODE END PTD */ /* Private define ------------------------------------------------------------*/ /* USER CODE BEGIN PD */ #define CAN_INST (0U) #define TX_MSG_ID (0x03UL) #define TX_MAILBOX (0x08UL) #define RX_LEGACY_FIFO (0UL) /* can not modify */ #define CAN0_RX_FIFO_FILTER_COUNT (8 * (FLEXCAN_RX_FIFO_ID_FILTERS_8 + 1)) /* USER CODE END PD */ /* Private macro -------------------------------------------------------------*/ /* USER CODE BEGIN PM */ /* USER CODE END PM */ /* Private variables ---------------------------------------------------------*/ /* USER CODE BEGIN PV */ //const flexcan_data_info_t rxMbStdInfo = { // .msg_id_type = FLEXCAN_MSG_ID_EXT, // .data_length = 8, // .fd_enable = false, // .fd_padding = 0, // .enable_brs = false, // .is_remote = false, //}; const flexcan_data_info_t txMbStdInfo = { .msg_id_type = FLEXCAN_MSG_ID_STD, .data_length = 8, .fd_enable = false, .fd_padding = 0, .enable_brs = false, .is_remote = false, }; const uint32_t rxFifoAccId[CAN0_RX_FIFO_FILTER_COUNT] = { 0x0C1001F0U, 0x0C1002F0U, 0x0C0803A5U, 0x0C1004F0U, 0x0C1005E0U, 0x0C1006F3U, 0x0C1007F0U, 0x737U, }; /* Define receive buffer */ flexcan_msgbuff_t rxMsg; /* Prepare message to be sent */ flexcan_msgbuff_t txMsg = { .cs = 0U, .msgId = TX_MSG_ID, .data[0] = 0x00, .dataLen = 8U, }; flexcan_id_table_t rxFifoFilterAccInfo[CAN0_RX_FIFO_FILTER_COUNT]; /* USER CODE END PV */ /* Private function declare --------------------------------------------------*/ /* USER CODE BEGIN PFDC */ /* USER CODE END PFDC */ static void Board_Init(void); /* Private user code ---------------------------------------------------------*/ /* USER CODE BEGIN 0 */ /* USER CODE END 0 */ /** * @brief The application entry point. * @retval int */ int main(void) { /* USER CODE BEGIN 1 */ status_t status = STATUS_SUCCESS; int32_t offset = 0; uint8_t fifoFrameCnt = 0; /* USER CODE END 1 */ Board_Init(); /* USER CODE BEGIN 2 */ PRINTF("Build %s %s\r\n", __DATE__, __TIME__); PRINTF("<----Flexcan legacy fifo demo---->\r\n"); /* Init rx fifo filter table acceptence code */ for (uint8_t i = 0; i < 7; i++) { rxFifoFilterAccInfo[i].isRemoteFrame = false; rxFifoFilterAccInfo[i].isExtendedFrame = true; rxFifoFilterAccInfo[i].id = rxFifoAccId[i]; } rxFifoFilterAccInfo[7].isRemoteFrame = false; rxFifoFilterAccInfo[7].isExtendedFrame = false; rxFifoFilterAccInfo[7].id = rxFifoAccId[7]; /* Can init */ status |= FLEXCAN_DRV_Init(CAN_INST, &flexcanInitConfig0_State, &flexcanInitConfig0); // FLEXCAN_DRV_ConfigRxFifo(CAN_INST, FLEXCAN_RX_FIFO_ID_FORMAT_A, rxFifoFilterAccInfo); // FLEXCAN_DRV_SetRxMaskType(CAN_INST, FLEXCAN_RX_MASK_INDIVIDUAL); // for(uint8_t i=0;i<7;i++) // { // FLEXCAN_DRV_SetRxIndividualMask(CAN_INST,FLEXCAN_MSG_ID_EXT,i, 0x1FFFFFFFU); // } // FLEXCAN_DRV_SetRxIndividualMask(CAN_INST, FLEXCAN_MSG_ID_STD, 7, 0x1FFFFFF0U); //0xFF87FFFEU FLEXCAN_DRV_ConfigRxFifo(CAN_INST, FLEXCAN_RX_FIFO_ID_FORMAT_B, rxFifoFilterAccInfo); FLEXCAN_DRV_SetRxMaskType(CAN_INST, FLEXCAN_RX_MASK_INDIVIDUAL); for(uint8_t i=0;i<7;i++) { FLEXCAN_DRV_SetRxIndividualMask(CAN_INST,FLEXCAN_MSG_ID_EXT,i, 0x1FFFFFFFU); } FLEXCAN_DRV_SetRxIndividualMask(CAN_INST, FLEXCAN_MSG_ID_STD, 7, 0x1FFFFFF0U); /* Configure TX buffer with index TX_MAILBOX*/ status |= FLEXCAN_DRV_ConfigTxMb(CAN_INST, TX_MAILBOX, &txMbStdInfo, TX_MSG_ID); /* Start receiving data in RX_STD_MAILBOX. */ status |= FLEXCAN_DRV_RxFifo(CAN_INST, &rxMsg); while (1) { // if (FLEXCAN_DRV_GetTransferStatus(CAN_INST, TX_MAILBOX) != STATUS_BUSY) // { // /* Configure sending data bytes */ // for (int i = 0; i < 8; i++) // { // txMsg.data[i] = offset + i; // } // offset++; // /* Send the information via CAN */ // status |= FLEXCAN_DRV_Send(CAN_INST, TX_MAILBOX, &txMbStdInfo, TX_MSG_ID, txMsg.data); // } if (FLEXCAN_DRV_GetTransferStatus(CAN_INST, RX_LEGACY_FIFO) != STATUS_BUSY) { fifoFrameCnt++; /* For concise output on UART, only print data[0] */ PRINTF("\nRx length= %d, id = %x, data[0] = %x:\r\n", rxMsg.dataLen, rxMsg.msgId, rxMsg.data[0]); /* start to receive new data */ status |= FLEXCAN_DRV_RxFifo(CAN_INST, &rxMsg); } // if (fifoFrameCnt >= 10) // { // break; // } /* send data every 100ms */ OSIF_TimeDelay(100); } PRINTF("\n\n"); PRINTF("Total %d frames legacy fifo has received.\n", fifoFrameCnt); PRINTF("<----Demo end---->\n"); /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { if (status != STATUS_SUCCESS) { break; } /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */ } static void Board_Init(void) { CLOCK_SYS_Init(g_clockManConfigsArr,CLOCK_MANAGER_CONFIG_CNT,g_clockManCallbacksArr,CLOCK_MANAGER_CALLBACK_CNT); CLOCK_SYS_UpdateConfiguration(CLOCK_MANAGER_ACTIVE_INDEX,CLOCK_MANAGER_POLICY_AGREEMENT); PINS_DRV_Init(NUM_OF_CONFIGURED_PINS0,g_pin_mux_InitConfigArr0); UTILITY_PRINT_Init(); } -
yt0069 感谢支持。以LE05开发板的Flexcan_Legacyfifo_Demo并使用标准帧为例。预期效果:标准帧ID低四位不进行匹配
①.现象:使用模式A时,独立掩码设置为0x1FFFFFF0U时,标准帧ID低四位不进行匹配。即可接受ID范围为0x730~0x73F的标准帧。--问题:独立掩码不应该设置成0xFF87FFFEU才能实现标准帧ID低四位不进行匹配吗?( RXIDA(standard = 29-19,extended = 29-1))
②.由①实际现象可得,独立掩码设置为0x1FFFFFF0U时 (RXIDB_0(standard = 29-19,extended = 29-16)),模式B也应该可以接受ID范围为0x730~0x73F的标准帧,但是实际上我只能接受0x737这一个标准帧ID。且我尝试修改了独立掩码的其他位,没有找到规律
以下为我的main.c代码
/* USER CODE END Header */ #include "sdk_project_config.h" /* Includes ------------------------------------------------------------------*/ /* Private includes ----------------------------------------------------------*/ /* USER CODE BEGIN Includes */ /* USER CODE END Includes */ /* Private typedef -----------------------------------------------------------*/ /* USER CODE BEGIN PTD */ /* USER CODE END PTD */ /* Private define ------------------------------------------------------------*/ /* USER CODE BEGIN PD */ #define CAN_INST (0U) #define TX_MSG_ID (0x03UL) #define TX_MAILBOX (0x08UL) #define RX_LEGACY_FIFO (0UL) /* can not modify */ #define CAN0_RX_FIFO_FILTER_COUNT (8 * (FLEXCAN_RX_FIFO_ID_FILTERS_8 + 1)) /* USER CODE END PD */ /* Private macro -------------------------------------------------------------*/ /* USER CODE BEGIN PM */ /* USER CODE END PM */ /* Private variables ---------------------------------------------------------*/ /* USER CODE BEGIN PV */ //const flexcan_data_info_t rxMbStdInfo = { // .msg_id_type = FLEXCAN_MSG_ID_EXT, // .data_length = 8, // .fd_enable = false, // .fd_padding = 0, // .enable_brs = false, // .is_remote = false, //}; const flexcan_data_info_t txMbStdInfo = { .msg_id_type = FLEXCAN_MSG_ID_STD, .data_length = 8, .fd_enable = false, .fd_padding = 0, .enable_brs = false, .is_remote = false, }; const uint32_t rxFifoAccId[CAN0_RX_FIFO_FILTER_COUNT] = { 0x0C1001F0U, 0x0C1002F0U, 0x0C0803A5U, 0x0C1004F0U, 0x0C1005E0U, 0x0C1006F3U, 0x0C1007F0U, 0x737U, }; /* Define receive buffer */ flexcan_msgbuff_t rxMsg; /* Prepare message to be sent */ flexcan_msgbuff_t txMsg = { .cs = 0U, .msgId = TX_MSG_ID, .data[0] = 0x00, .dataLen = 8U, }; flexcan_id_table_t rxFifoFilterAccInfo[CAN0_RX_FIFO_FILTER_COUNT]; /* USER CODE END PV */ /* Private function declare --------------------------------------------------*/ /* USER CODE BEGIN PFDC */ /* USER CODE END PFDC */ static void Board_Init(void); /* Private user code ---------------------------------------------------------*/ /* USER CODE BEGIN 0 */ /* USER CODE END 0 */ /** * @brief The application entry point. * @retval int */ int main(void) { /* USER CODE BEGIN 1 */ status_t status = STATUS_SUCCESS; int32_t offset = 0; uint8_t fifoFrameCnt = 0; /* USER CODE END 1 */ Board_Init(); /* USER CODE BEGIN 2 */ PRINTF("Build %s %s\r\n", __DATE__, __TIME__); PRINTF("<----Flexcan legacy fifo demo---->\r\n"); /* Init rx fifo filter table acceptence code */ for (uint8_t i = 0; i < 7; i++) { rxFifoFilterAccInfo[i].isRemoteFrame = false; rxFifoFilterAccInfo[i].isExtendedFrame = true; rxFifoFilterAccInfo[i].id = rxFifoAccId[i]; } rxFifoFilterAccInfo[7].isRemoteFrame = false; rxFifoFilterAccInfo[7].isExtendedFrame = false; rxFifoFilterAccInfo[7].id = rxFifoAccId[7]; /* Can init */ status |= FLEXCAN_DRV_Init(CAN_INST, &flexcanInitConfig0_State, &flexcanInitConfig0); // FLEXCAN_DRV_ConfigRxFifo(CAN_INST, FLEXCAN_RX_FIFO_ID_FORMAT_A, rxFifoFilterAccInfo); // FLEXCAN_DRV_SetRxMaskType(CAN_INST, FLEXCAN_RX_MASK_INDIVIDUAL); // for(uint8_t i=0;i<7;i++) // { // FLEXCAN_DRV_SetRxIndividualMask(CAN_INST,FLEXCAN_MSG_ID_EXT,i, 0x1FFFFFFFU); // } // FLEXCAN_DRV_SetRxIndividualMask(CAN_INST, FLEXCAN_MSG_ID_STD, 7, 0x1FFFFFF0U); //0xFF87FFFEU FLEXCAN_DRV_ConfigRxFifo(CAN_INST, FLEXCAN_RX_FIFO_ID_FORMAT_B, rxFifoFilterAccInfo); FLEXCAN_DRV_SetRxMaskType(CAN_INST, FLEXCAN_RX_MASK_INDIVIDUAL); for(uint8_t i=0;i<7;i++) { FLEXCAN_DRV_SetRxIndividualMask(CAN_INST,FLEXCAN_MSG_ID_EXT,i, 0x1FFFFFFFU); } FLEXCAN_DRV_SetRxIndividualMask(CAN_INST, FLEXCAN_MSG_ID_STD, 7, 0x1FFFFFF0U); /* Configure TX buffer with index TX_MAILBOX*/ status |= FLEXCAN_DRV_ConfigTxMb(CAN_INST, TX_MAILBOX, &txMbStdInfo, TX_MSG_ID); /* Start receiving data in RX_STD_MAILBOX. */ status |= FLEXCAN_DRV_RxFifo(CAN_INST, &rxMsg); while (1) { // if (FLEXCAN_DRV_GetTransferStatus(CAN_INST, TX_MAILBOX) != STATUS_BUSY) // { // /* Configure sending data bytes */ // for (int i = 0; i < 8; i++) // { // txMsg.data[i] = offset + i; // } // offset++; // /* Send the information via CAN */ // status |= FLEXCAN_DRV_Send(CAN_INST, TX_MAILBOX, &txMbStdInfo, TX_MSG_ID, txMsg.data); // } if (FLEXCAN_DRV_GetTransferStatus(CAN_INST, RX_LEGACY_FIFO) != STATUS_BUSY) { fifoFrameCnt++; /* For concise output on UART, only print data[0] */ PRINTF("\nRx length= %d, id = %x, data[0] = %x:\r\n", rxMsg.dataLen, rxMsg.msgId, rxMsg.data[0]); /* start to receive new data */ status |= FLEXCAN_DRV_RxFifo(CAN_INST, &rxMsg); } // if (fifoFrameCnt >= 10) // { // break; // } /* send data every 100ms */ OSIF_TimeDelay(100); } PRINTF("\n\n"); PRINTF("Total %d frames legacy fifo has received.\n", fifoFrameCnt); PRINTF("<----Demo end---->\n"); /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { if (status != STATUS_SUCCESS) { break; } /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */ } static void Board_Init(void) { CLOCK_SYS_Init(g_clockManConfigsArr,CLOCK_MANAGER_CONFIG_CNT,g_clockManCallbacksArr,CLOCK_MANAGER_CALLBACK_CNT); CLOCK_SYS_UpdateConfiguration(CLOCK_MANAGER_ACTIVE_INDEX,CLOCK_MANAGER_POLICY_AGREEMENT); PINS_DRV_Init(NUM_OF_CONFIGURED_PINS0,g_pin_mux_InitConfigArr0); UTILITY_PRINT_Init(); } -
 H HAIYANG 在 中 引用了 这个主题
H HAIYANG 在 中 引用了 这个主题
-
,
F Frankie 将这个主题转为问答主题
-
,
快速上手云途开发生态
发帖前请查看
帮助改进和优化YT CONFIG TOOL,有机会抽取YTM32B1ME0 EVB哦...